testing my new leaf-blower.



Octocopter build progress. And an emergency landing from the test flight. On low-power activation, the landing gear raised instead of lowered and wouldn’t let me send a command to lower them again. I had about 15 seconds to find this piece of firewood and prop it up on a mulch pile (all while holding the up-elevator stick, telling the flight controller not to land yet!) and then maneuver the octocopter to land on the frame and balance as the bottom props spun down. Thank goodness i found the center of gravity on the first try!)











Stills from last weekend shooting in the Salt Flats with my brother Kael.




stills from this weekend upstate.
thanks for the photo matt murphy!

Inspired by this video (and many like it), I started building a flying wing. Which turned into three flying wings. The big boy is a RiteWing Zephyr 2. It will have an FPV camera in the nose with (at first) a GoPro next to it recording HD (the FPV camera sends a lower-res but less delayed signal to me on the ground). Once i'm comfortable flying the thing and have the settings dialed in I'll put the GoPro in a motion-stabilized gimbal to get some loooong gorgeous aerial shots in places i would be nervous to send a multi-rotor. Practicing flying these in my Sim apps I found I REALLY enjoy gliding in the wind on thermals (SO calming) and found another type of flying wing that's made for gliding or "slope soaring". The ZAGI THL, has no motor, is super light and can fly for an hour-ish? on a single NiCad battery. Nearing completion on the Zephyr 2 i realized i should get some practice on a small wing before risking a crash due to inexperience. And along came wing #3, the teensie-weensie "Skywalker X1". Which i still opted to pimp out by adding an EagleTree Guardian Flight Stabilizer. Head out for maiden flights tomorrow with both the ZAGI and the Skywalker.


Upgrading to "anti-gravity" tiger-motors, which will make the drone 0.8 pounds lighter, and add 2+ minutes of flight time. Also moving from Futaba FASSTest 2.4 Ghz control link to 433 Mhz Dragonlink for longer range, AND adding a remote video switch and small FPV camera on the front in case the GoPro locks up. The work is never done...
my second FPV drone video (first person view) getting a bit more comfortable (practicing with fewer trees around helps quite a bit) music by robot repair!

FPV (first persion view), flying by watching a low-res video feed through a pair of goggles. this is the video captured from an HD camera mounted on top (a gopro knockoff designed for this). the visual you see to control the drone is much lower resolution and cuts out occasionally with radio interference so its harder than it looks here. thankfully, i opted to instal prop guards or this flight would have been over after the first collision.
Crashed on Fogo Island, Newfoundland. And I totally caused it. I was bringing it back to land and lowered the throttle and pitched all the way back to head towards me in reverse, which will bring it in fast. This stick position will also disarm the motors! So basically I switched the darn thing off before it landed. After miles and miles of driving and thinking about what caused it, I realized this mistake was from bad learning on my part. The simulator I practice on turns the engines off @ 0% throttle, but the Naza V2 flight controller cuts the engines when throttle is below 10%. I had practiced this quick-return maneuver thousands of times on the simulator not realizing what the Sticks would tell my actual drone in flight. I now have set the Futaba controller to beep at me when I move the stick below 12%, reminding me not to let it sit there long enough to disarm the motors. I was lucky the GoPro cover took the hit and the camera lens didn't shatter. Unfortunately i did not notice until returning home that the RageCam Lens got knocked out of alignment on impact so some shots of the trip after this are slightly blurred on the left side of the frame.













Hoping for the best, preparing for the worst...looking ahead, flying over oceans and off of giant cliffs, if something goes wrong it may be a total loss. So I scrambled to get a second QAV540 built, tested and ready to take with me on my summer vacation.
all music by my brother's band "Faded Paper Figures"
testing my new build before mounting the gimbal and video system.
Mad scientist at work.

getfpv.com shipping boxes make a perfect kitty beds.


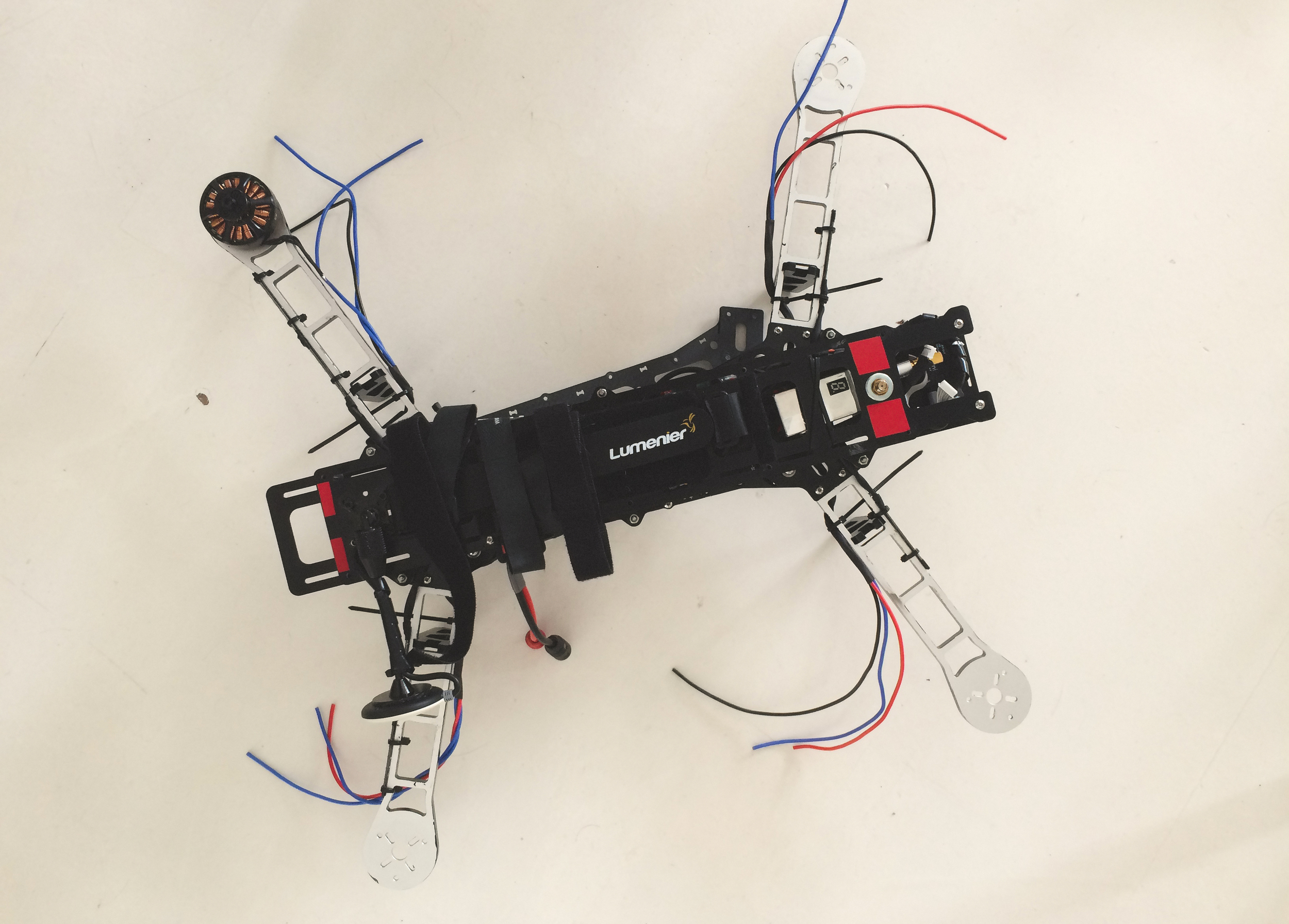
Well, obviously this one didn't go as planned. Pilot error: I lost orientation for a second and pulled off the throttle, and it lost altitude, okay, ALL altitude. I simply got confused and didn't give it enough throttle to keep it from hitting the ground. Disappointing. But the arm shouldn't have broken since it was not a very hard landing. I think constantly snapping the arms in and out of extended position may have weakened them. This inspire me to move all the gear over to the Lumenier QAV540 frame. I will have to make my own gimbal mounting plate for the camera but i like that the lumeniere frame has aluminum arms (which bend, not break) and short landing gear that stay out of the way of the camera, not needing to be retracted. Back to the work-bench.
I'm going to update my "Intro to droning" advice to say, just buy this book. It covers everything you will want to know to get started.